Now that the press flurry over the NTSB's report on the Autonomous
Driving System (ADS) fatality in Tempe has subsided, it's important to reflect
on the lessons to be learned. Hats off to the NTSB for absolutely nailing this.
Cheers to the Press who got the messaging right. But not everyone did. The goal
of this essay is to help focus on the right lessons to learn, clarify publicly
stated misconceptions, and emphasize the most important take-aways.
I encourage everyone in the AV industry to watch the first 5
and a half minutes of the NTSB board meeting video
( Youtube: Link // NTSB Link).
Safety leadership should watch the whole thing. Probably twice. Then present a
summary at your company's lunch & learn.
Pay particular attention to this part from
Chairman Sumwalt: "If your company
tests automated driving systems on public roads, this crash -- it was about
you. If you use roads where automated
driving systems were being tested, this crash -- it was about you."
I live in Pittsburgh and these public road tests happen near
my place of work and my home. I take the lessons from this crash personally. In principle, every
time I cross a street I'm potentially placed at risk by any company that might
be cutting corners on safety. (I hope that's none. All the companies testing
here have voluntarily submitted compliance reports for the well-drafted PennDOT
testing guidelines. But not every state has those, and those guidelines were
developed largely in response to the fatality we’re discussing.)
I also have long time friends who have invested their
careers in this technology. They have brought a vibrant and promising industry
to Pittsburgh and other cities. Negative
publicity resulting from a major mishap can threaten the jobs of those employed
by those companies.
So it is essential for all of us to get safety right.
The first step: for anyone in charge of testing who doesn't know
what a Safety Management System (SMS) is: (A) Watch that NSTB hearing intro.
(B) Pause testing on public roads until your company makes a good start down
that path. (Again, the PennDOT guidelines are a reasonable first step accepted
by a number of companies.
LINK)
You’ll sleep better having dramatically
improved your company’s safety culture before anyone gets hurt unnecessarily.
Clearing up some misconceptions
I’ve seen
some articles and commentary that missed the point of all of this.
Large segments of coverage emphasized technical shortcomings of the system - That's
not the point. Other coverage highlighted test driver distraction - That's
not the point either. Some blame that it was too dark, which is simply untrue -- NTSB estimates the pedestrian was visible at the full line of sight range of 637 feet. The fatal
mishap involved technical shortcomings, and the test driver was not paying
adequate attention. Both contributed to the mishap, and both were bad things.
But the lesson to
learn is that solid safety culture is without a doubt necessary to prevent
avoidable fatalities like these. That is the Point.
To make the most of this teachable moment let's break things
down further. These discussions are not really about the particular test
platform that was involved. The NTSB report gave that company credit for
significant improvement. Rather, the objective is to make sure everyone is
focused on ensuring they have learned the most important lesson so we don’t
suffer another avoidable ADS testing fatality.
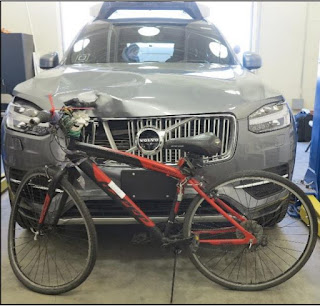
A self-driving car
killed someone - NOT THE POINT
This was not a self-driving car. It was a test platform for
Automated Driving System (ADS) technology. The difference is night and day. Any argument that this vehicle was safe to
operate on public roads hinged on a human driver not only taking complete
responsibility for operational safety, but also being able to intervene when
the test vehicle inevitably made a mistake. It's not a fully automated
self-driving car if a driver is required to hover with hands above the steering
wheel and foot above the brake pedal the entire time the vehicle is operating.
It's a test vehicle. The correct statement is: a test
vehicle for developing ADS technology killed someone.
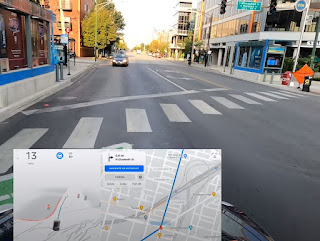
The pedestrian was initially
said to jump out of the dark in front of the car - NOT THE POINT
I still hear this sometimes based on the initial video clip
that was released immediately after the mishap. The pedestrian walked across
almost 4 lanes of road in view of the test vehicle before being struck, with sufficient lighting to have been seen by the driver. The
test vehicle detected the pedestrian 5.6 seconds before the crash. That was
plenty of time to avoid the crash, and plenty of time to track the pedestrian
crossing the street to predict that a crash would occur. Attempting to claim
that this crash was unavoidable is incorrect, and won't prevent the next ADS
testing fatality.
It's the pedestrian's
fault for jaywalking - NOT THE POINT
Jaywalking is what people do when it is 125 yards to the
nearest intersection and there is a paved walkway on the median. Even if there
is a sign saying not to cross. Tearing
up the paved walkway might help a little on this particular stretch of road,
but that's not going to prevent jaywalking as a potential cause of the next ADS
testing fatality.
Victim's apparent
drug use - NOT THE POINT
It was unlikely that the victim was a fully functional,
alert pedestrian. But much of the population isn't in this category for other
reasons. Children, distracted walkers, and others with less than perfect
capabilities and attention cross the street every day, and we expect drivers to
do their best to avoid hitting them.
There is no indication that the victim’s medical condition substantively
caused the fatality. (We're back to the fact that the pedestrian did not jump
in front of the car.) It would be unreasonable to insist that the public has the
responsibility to be fully alert and ready to jump out of the way of an errant ADS
test platform at all times they are outside their homes.
Tracking and
classification failure - NOT THE POINT
The ADS system on the test vehicle suffered some technical
issues that prevented predicting where the pedestrian would be when the test
vehicle got there, or even recognizing the object it was sensing was a
pedestrian walking a bicycle. However, the point of operating the test vehicle was
to find and fix defects.
Defects were expected, and should be expected on other ADS test
vehicles. That's why there is a human safety driver. Forbidding public road
testing of imperfect ADS systems basically outlaws road testing at this stage.
Blaming the technology won't prevent the next ADS testing fatality, but it
could hurt the industry for no reason.
It's the technology's
fault for ignoring jaywalkers - NOT THE POINT
This idea has been circulating, but apparently this isn't
quite true. Jaywalkers aren't ignored, but rather according to the information
presented by the NTSB a pedestrian isn't expected to cross the street at first.
Once the pedestrian moves for a while a track is built up that could indicate
street crossing, but until then movement into the street is considered
unexpected if the pedestrian is not at a designated crossing location. A deployment-ready
ADS could potentially use a more sophisticated approach to predict when a
pedestrian would enter the roadway.
Regardless of implementation, this did not contribute to the
fatality because the system never actually classified the victim as a
pedestrian. Again, improving this or other ADS technical features won't prevent
the next ADS testing fatality. That’s because testing safety is about the
safety driver, not which ADS prototype functions happen to be active on any
particular test run.
ADS emergency braking
behavior - NOT THE POINT
The ADS emergency braking function had behaviors that could hinder
its ability to provide backup support to the safety driver. Perhaps another
design could have done better for this particular mishap. However, it wasn't
the job of the ADS emergency braking to avoid hitting a pedestrian. That was
the safety driver's job. Improving ADS emergency braking capabilities might
reduce the probability of an ADS testing fatality, but won't entirely prevent the
next fatality from happening sooner than it should.
Native emergency
braking disabled - NOT THE POINT
It looks bad to have disabled the built-in emergency braking
system on the passenger vehicle used as the test platform. The purpose of such
systems is to help out after the driver makes a mistake. In this case there is
a good, but not perfect, chance it would have helped. But as with the ADS
emergency braking function, this simply improves the odds. Any safety expert is
going to say your odds are better with both belt and suspenders, but enabling
this function alone won't entirely prevent the next ADS testing fatality from
happening before it should.
Inattentive safety
driver - NOT THE POINT
There is no doubt that an inattentive safety driver is
dangerous when supervising an ADS test vehicle. And yet, driver complacency is
the expected outcome of asking a human to supervise an automated system that
works most of the time. That’s why it’s important to ensure that driver
monitoring is done continually and used to provide feedback. (In this case a
form of driver monitoring equipment was installed, but data was apparently not used
in a way that assured effective driver alertness.)
While enhanced training and stringent driver selection can
help, effective analysis and action taken upon monitoring data is required to
ensure that drivers are actually paying attention in practice. Simply firing
this driver without changing anything else won't prevent the next ADS testing
fatality from happening to some other driver who has slipped into bad operational
habits.
A fatality is regrettable, but human drivers killed about 100
people that same day with minimal news attention - NOT THE POINT
Some commentators point out the ratio of fatalities caused
by test vehicles vs. general automotive fatality rates. They then generally
argue that a few deaths in comparison to the ongoing carnage of regular cars is
a necessary and appropriate price to pay for progress. However, this argument
is not statistically valid.
Consider a reasonable goal that ADS testing (with highly
qualified, alert drivers presumed) should be no more dangerous than the risk
presented by normal cars. For normal US cars that's ballpark 500 million road
miles per pedestrian fatality. This includes mishaps caused by drunk,
distracted, and speeding drivers. Due to the far smaller number of miles being
driven by current test platform fleet sizes, the "budget" for fatal
accidents due to ADS road testing phase should, at this early stage, still be
zero.
The fatality somehow “proves”
that self-driving car technology isn't viable - NOT THE POINT
Some have tried to draw conclusions about the viability of
ADS technology from the fact that there was a testing fatality. However, the
issues with ADS technical performance only prove what we already knew. The
technology is still maturing, and a human needs to intervene to keep things
safe. This crash wasn't about the maturity of the technology; it was about
whether the ADS public road testing itself was safe.
Concentrating on technology maturity (for example, via
disclosing disengagement rates) serves to focus attention on a long term future
of system performance without a safety driver. But the long term isn’t what’s
at issue.
The more pressing issue is ensuring that the road testing
going on right now is sufficiently safe. At worst, continued use of
disengagement rates as the primary metric of ADS performance could hurt safety rather
than help. This is because disengagements, if gamed, could incentivize safety
drivers to take chances by avoiding disengagements in uncertain situations to
make the numbers look better. (Some companies no doubt have strategies to
mitigate this risk. But those are probably the companies with an SMS, which is
back to the point that matters.)
THE POINT: The safety
culture was broken
Safety culture issues were the enabler for this particular crash. Given the limited number of miles that
can be accumulated by any current test fleet, we should see no fatalities occur
during ADS testing. (Perhaps a truly unavoidable fatality will occur. This is
possible, but given the numbers it is unlikely if ADS testing is reasonably
safe. So our goal should be set to zero.) Safety culture is critical to ensure
this.
The NTSB rightly pushes hard for a safety management system
(SMS). But be careful to note that they simply say that this is a part of
safety culture, not all of it. Safety culture means, among other things, taking
responsibility for ensuring that their safety drivers are actually safe despite
the considerable difficulty of accomplishing that. Human safety drivers will
make mistakes, but a strong safety culture accounts for such mistakes in ensuring
overall safety.
It is important to note that the urgent point here is not
regulating self-driving car safety, but rather achieving safe ADS road testing.
They are (almost) two entirely different things. Testing safety is about
whether the company can consistently put an alert, able-to-react safety driver
on the road. On the other hand, ADS safety is about the technology. We need to
get to the technology safety part over time, but ADS road testing is the main
risk to manage right now.
Perhaps dealing with ADS safety would be easier if the
discussions of testing safety and deployment safety were more cleanly
separated.
THE TAKEAWAYS:
Chairman Sumwalt summed it up nicely in the intro. (You did
watch that 5 and half minute intro, right?)
But to make sure it hits home, this is my take:
One company's crash is every company's crash. You'll note I didn't name the company
involved, because really that's irrelevant to preventing there from being a
next fatality and the potential damage it could do to the industry’s reputation.
The bigger point is every company can and should
institute good safety culture before further fatalities take place if they
have not done so already. The NTSB credited the company at issue with
significant change in the right direction. But it only takes one company who hasn’t gotten
the message to be a problem for everyone. We can reasonably expect fatalities involving
ADS technology in the future even if these systems are many times safer than
human drivers. But there simply aren’t that many vehicles on the road yet for a
truly unavoidable mishap to be likely to occur. It’s far too early.
If your company is testing (or plans to test) autonomous
vehicles, get a Safety Management System in place before you do public road testing.
At least conform to the details in the PennDOT testing guidelines, even if
you’re not testing in Pennsylvania. If you are already testing on public roads
without an SMS, you should stand down until you get one in place.
Once you have an SMS, consider it a down-payment on a
continuing safety culture journey.
Prof. Philip Koopman, Carnegie Mellon University
Author Note: The
author and his company work with a variety of customers helping to improve
safety. He has been involved with self-driving car safety since the late 1990s.
These opinions are his own, and this piece was not sponsored.